








Con los dos canales de salida del Codificador de cuadratura puede medir tanto la posición como la dirección de rotación de un eje VEX. Esto le permitirá calcular la velocidad del eje, así como la distancia recorrida con el software de programación. Los codificadores se usan típicamente para aplicaciones de "rotación infinita", tales como una rueda motriz. Se necesita un kit de programación para cambiar el programa en el controlador VEX para usar el codificador de cuadratura.

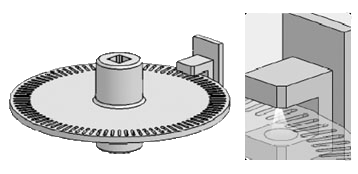
El codificador de eje óptico se utiliza para medir tanto la posición relativa como la distancia de rotación recorrida por un eje. Trabaja brillando la luz en el borde de un disco equipado con las ranuras uniformemente espaciadas alrededor de la circunferencia. A medida que el disco gira, la luz pasa a través de las ranuras y es bloqueada por los espacios opacos entre las ranuras. El codificador detecta entonces cuántas hendiduras han tenido luz brillando a través, y en qué dirección el disco está girando.
El codificador de eje óptico se puede utilizar para mejorar un robot de varias maneras. El codificador puede medir la distancia de rotación recorrida y la velocidad, que puede usarse para controlar, por ejemplo, la posición angular de un brazo de agarre de robot o la velocidad de un robot. Conocer estos parámetros puede ayudarle en gran medida a realizar tareas autónomas con su robot.
El codificador de eje óptico puede usarse para rastrear la distancia recorrida, la dirección del movimiento o la posición de cualquier componente rotatorio, tal como un brazo de pinza. El codificador también puede usarse para detectar movimiento, lo que podría facilitar una interacción más rica entre el robot y su entorno (por ejemplo, interacción humano-robot). Si un ser humano mueve un brazo de robot que está conectado a un codificador (por ejemplo, durante un apretón de manos), el robot detecta el movimiento del brazo y la dirección (s) y la distancia recorrida, ayudando al robot a clasificar la interacción como un apretón de manos.
Mientras que el diámetro del disco en el codificador realmente no importa, el diámetro de la rueda o del engranaje cuyo eje pasa a través del codificador hace! La circunferencia de la rueda es igual a su diámetro multiplicado por pi (aproximadamente 3,14). Multiplicar la distancia recorrida que cuando se multiplica por el número de revoluciones da de la distancia recorrida.
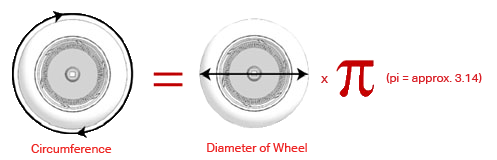
Figura 3. Fórmula de la circunferencia de la rueda
El codificador de eje óptico puede detectar hasta 1.700 pulsos por segundo, lo que corresponde a 18,9 revoluciones por segundo ya 1,133 rpm (revoluciones por minuto). Por tanto, las revoluciones más rápidas no se interpretarán exactamente, lo que podría dar lugar a que se pasen datos de posición erróneos al microcontrolador.
(2) Codificador de cuadratura de eje óptico
Motor 393 Módulo de encoder integrado (276-1321)
.06 lbs
Tipo: Rotación mecánica
Rotación: continua
Tamaño: VEX estándar 1/8 en el eje
Cable de 3 hilos.
0.078 libras (35.4 gramos)
Compatible con todos los microcontroladores VEX y cable de extensión de 3 hilos
{kind=link}